Фотоэлектрические Системы

Описание применения
Развитие технологии за последние десятилетия привело к экспоненциальному росту глобального потребления энергии, основные источники которой постепенно истощаются (нефть, газ и уголь); это привело к растущей потребности в создании возобновляемых источников энергии.
За последние годы развитие исследований и инновации привели к увеличению использования солнечной энергии в качестве альтернативного источника энергии, и мы наблюдаем постоянный рост рынка фотоэлектрических систем.
В связи с этим существует необходимость повышения эффективности с помощью технологий, способных улучшить производство энергии фотоэлектрическими модулями, таких как электромеханические и электронные системы, следующие за траекторией солнца так долго, как это возможно (солнечные трекеры).
Можно выделить различные типы солнечных трекеров по трем основным признакам:
1. Положение привода
- Активные солнечные трекеры, в которых движение генерируется электромеханическими элементами;
- Пассивные солнечные трекеры, в которых движение генерируется физическими событиями, не требующими электрической энергии.
2. Степени свободы движения
- Одноосные трекеры: они имеют только одну степень свободы, то есть вращаются вокруг одной оси.
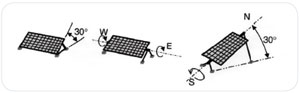
Это оборудования подразделяется на следующие типы:
- Наклонные солнечные трекеры : ось вращения восток-запад
- Роликовые солнечные трекеры: ось вращения север-юг
- Азимутные солнечные трекеры : движение вокруг вертикальной оси зенит-надир
- Солнечные трекеры с полярной осью: они движутся вдоль одной оси, наклоненной к земле и примерно параллельной оси вращения земли, обеспечивая максимальную эффективность, которая достигается всего лишь одной осью вращения.
- Двухосевые солнечные трекеры : они имеют две степени свободы и предназначены для точного выравнивания в режиме реального времени солнечного трекера с лучами солнца, что также означает более сложную конструкцию.
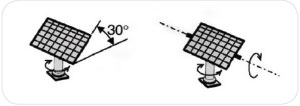
Они подразделяются на следующие типы:
- Солнечные трекеры азимут-подъем: : они следуют за солнцем в любой точке на небе с помощью управления ПЛК; имеют альтазимут монтажа, образованный основной осью, вертикальной по отношению к земле, и второстепенной осью, обычно перпендикулярной первой.
- Наклонно-роликовые солнечные трекеры: : они следуют за солнцем в любой точке на небе с помощью управления ПЛК; имеют основную ось, параллельную земле, и второстепенную ось, перпендикулярную первой.
3. Управление приводом
- Аналоговое: управление приводом основывающееся на информации, полученной от датчика, который определяет положение самой яркой точки на небе.
- Цифровое: управление приводом осуществляется микропроцессором, который определяет в каждый конкретный момент положение солнца на небе по таблицам в памяти.
Большинство солнечных трекеров работают от электродвигателей постоянного или переменного тока; учитывая, что система имеет малую скорость вращения, часто необходимо использовать мотор-редуктор для уменьшения скорости до значения, приемлемого для отслеживания.
Выбор системы слежения зависит от многих факторов, включая размер и характеристики структуры и места установки, широту, погоду и климат.
Пример решения Motovario:
Для производства энергии с помощью фотоэлектрических систем Motovario предлагает червячные мотор-редукторы для установки формирования монокристаллического кремния и движения одно- и двухосных солнечных трекеров.
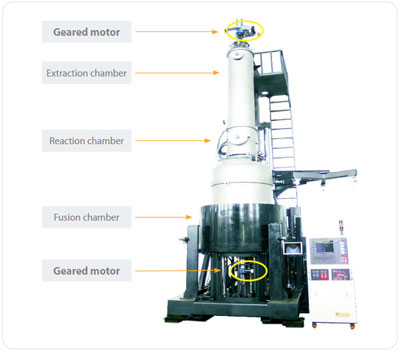
- Установка для формирования и добычи монокристаллического кремния, из которых состоит фотоэлектрический модуль, обычно состоит из камеры плавки, реакционной камеры и камеры экстракции; поставляемые мотор-редукторы регулируют вращение и подъем крупиц монокристаллического кремния.
- Для вращательного движения в камере плавки используется червячный мотор-редуктор NMRV 040;
- Для вращательного движения в реакционной камере используется червячный мотор-редуктор NMRV 040.;
- Для вращательного движения в камере экстракции используется червячный мотор-редуктор NMRV 040.
- Для вращательного движения в камере экстракции используется двухступенчатый червячный мотор-редуктор NMRV 030+ NMRV POWER 063..
Для движения ролика солнечного трекера используется двухступенчатый червячный мотор-редуктор NMRL 050 + NMRV-P 110

| Общее передаточное отношение (i) | 600 |
| Диам. полого выходного вала | Ø42 |
| Специальная конструкция редуктора | Ограничитель момента между двумя редукторами |
| Размер двигателя | 080 - 4 poli |
| Мощность двигателя | 1,1 kW |
Для наклонного движения солнечного трекера используется червячный мотор-редуктор NMRV 040

| Передаточное отношение (i) | 30 |
| Диам. полого выходного вала | Ø18 |
| Размер двигателя | 063 - 4 poles |
| Мощность двигателя | 0,25 kW |
