光伏产业

应用描述
最近几十年的技术发展,导致了全球能源消费指数的增长,这逐渐耗尽了主要能源(石油、天然气和煤炭),这个结果促使急需创造出一种可再生的能源。
在过去几年的研究进展和创新过程中,使用太阳能作为一种替代能源得到了广泛地应用,因此我们也看到了稳定增长的光伏市场。
因此需要通过技术发展,找到一个更有效的增长方式,来促进光伏产业产量的增长,如机电和电子系统,尽可能长时间跟随太阳的轨迹运动 (太阳能跟踪器)。
根据三个主要因素太阳能根踪器可以分成不同的类型:
1. 定位驱动
- 主动式太阳能跟踪器,驱动方式是通过电动机械元件;
- 被动式太阳能跟踪器,驱动方式是物理方式,不需要电动。
2. 运动的自由角度
- 单轴跟踪器: 它们只有单一的自由角度,因此只能在单一的轴上旋转。
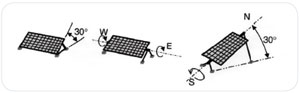
这些设备主要被分类为:
- 倾斜式太阳能跟踪器:旋转轴是东西方向的
- 转动式太阳能跟踪器:旋转轴是南北方向的
- 方位角式太阳能跟踪器:它是在一个垂直的轴的顶点上运动的
- 极轴太阳能跟踪器:它沿着一个倾向于地面的轴运动,且近乎平行于地球自转的旋转轴,这样就可以实现只有一个转动轴但获得最大的效率。
- 双轴太阳能跟踪器: 它们有两个自由角度,并通过设计完美的结合,可以实时的跟踪太阳的太阳射线,但这也意味着一个更复杂的设计。
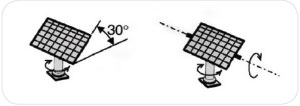
它们被分类为:
- 方位和高度太阳能追踪器:它们通过PLC控制,可以实时的跟踪太阳在空中的任何点位;它们拥有地平装置,主轴线与地面垂直,通常副轴线垂直于主轴线。
- 倾斜-转动式太阳能跟踪器:它们通过PLC控制,可以实时的跟踪太阳在空中的任何点位;他们的主坐标轴与地面平行,并且副轴线垂直于主轴线
3. 驱动控制
- 模拟:驱动控制的设置信息源自一个传感器,它能识别天空中最亮的点的位置;
- 数字:驱动控制的设置源自一个微处理器,它通过存储表,可以知道任何时候,太阳在天空中的位置
大多数的太阳能跟踪器由电动机驱动(直流或交流电源),一般考虑到系统的低转速,它通常需要使用一个齿轮减速电动机来降低速度以达到可接受的“跟踪”值。
追踪系统的选择取决于很多因素,包括尺寸和结构的特征、安装位置的纬度,天气和气候。
摩铎利解决方案:
就能源产业中的光伏产业而言,摩铎利为安装硅晶面板以及单/双轴太阳能跟踪器的运转供应涡轮传动马达。
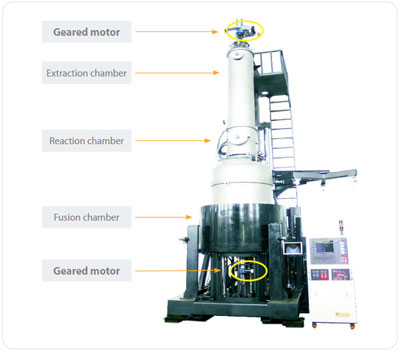
- 单晶硅光伏模块的形成和萃取装置,通常由一个融合室,一个反应室和一个萃取室组成的;供应的的齿轮马达主要用于调节单晶硅面板的旋转和升降运动
- 融合室的旋转运动主要是使用NMRV 040涡轮传动马达;
- 融合室的升降运动主要是使用NMRV 040涡轮传动马达
- 萃取室的升降运动主要是使用NMRV 040涡轮传动马达;
- 萃取室的旋转运动主要使用一对涡轮传动马达NMRV 030 + NMRV POWER 063
太阳能跟踪器的运动主要是使用一对涡轮传动马达NMRL 050 + NMRV-P 110

| 全部传输速比(i) | 600 |
| 空心的输出轴直径 | Ø42 |
| 特殊设计的齿轮箱 | 两个减速机之间的扭矩限制器 |
| 电机尺寸 | 080 - 4 极 |
| 电机功率 | 1,1 kW |
倾斜式双轴太阳能追踪器是使用一个NMRV 040的涡轮传动马达

| 传输速比 (i) | 30 |
| 空心的输出轴直径 | Ø18 |
| 电机尺寸 | 063 - 4 极 |
| 电机功率 | 0,25 kW |
对于方位角式的太阳能跟踪器,根据跟踪器的外形尺寸,使用下面设备:
- 两个涡轮减速机 NMRV 040 + NMRV POWER 090
全部传输速比 (i) 1800 空心的输出轴直径 Ø35 电机尺寸 063 - 4 poles 电机功率 0,18 kW
- 两个涡轮减速机NMRV 050 + NMRV POWER 110
全部传输速比 (i) 1800 空心的输出轴直径 Ø35 电机尺寸 063 - 4 poles 电机功率 0,18 kW
减速机类型的选择,主要根据太阳能跟踪器,归功于以下因素:
- 高传输速比与小尺寸,确保一个缓慢旋转的追踪
- 零背隙
- 可能使用一个扭矩限制器
- 低速轴的不可逆性,不允许跟踪器的运动在相反的方向
